Radarbasierte Positionsbestimmung
Industrieroboter hochpräzise und dennoch kostengünstig einsetzen zu können, das ist das Ziel des Forschungsprojekts Radarmeter-3D. Industrieroboter weisen eine meist sehr gute relative Positionsgenauigkeit auf. Das Erreichen einer hochpräzisen und belastungsunabhängigen absoluten Positionsgenauigkeit ist jedoch ein bisher nicht zufriedenstellend gelöstes Problem. Optische Sensorverfahren zur Positionsregelung sind empfindlich gegen Staub und Feuchtigkeit. Darüber hinaus sind die Sensoren entweder unpräzise, langsam und günstig, wie kamerabasierte Verfahren, oder präzise und schnell dafür aber teuer, wie z.B. laserbasierte Systeme. Im aktuellen Projekt wird ein Multi-Radar-Sensorsystem zur hochpräzisen und dreidimensionalen Positionsbestimmung erforscht.
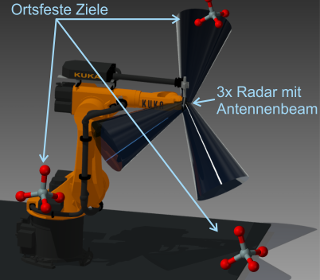
Das Messsystem wird hierfür mit mindestens drei Radar-Sensoren ausgestattet, die in Abhängigkeit von ortsfesten Referenzzielen die dreidimensionale Position des Roboters im Raum bestimmen. Zusätzlich liefert eine Kopplung mit einer Umgebungssimulation a-priori-Information für eine smarte Signalverarbeitung und Zielinterpretation. Der Sensor ist dann in der Lage anhand der aktuellen Messungen Winkelfehler zu kompensieren. Ein solcher -dank Radar-Positionssensor- flexibel einsetzbarer Industrieroboter erschließt viele Anwendungsfelder, wie z.B. die Vermessung und Qualitätssicherung von Fertigungsteilen in Industrieprozessen oder die Navigation von autonomen mobilen Robotern. Der Lehrstuhl für Elektronische Schaltungstechnik erarbeitet in diesem Rahmen eine Sensorfusions-Einheit sowie die entsprechenden Algorithmen.
Das Projekt wurde in den Leitmarktwettbewerben der LeitmarktAgenturNRW erfolgreich beantragt und wird zu gleichen Teilen vom Land NRW und der EU gefördert.
